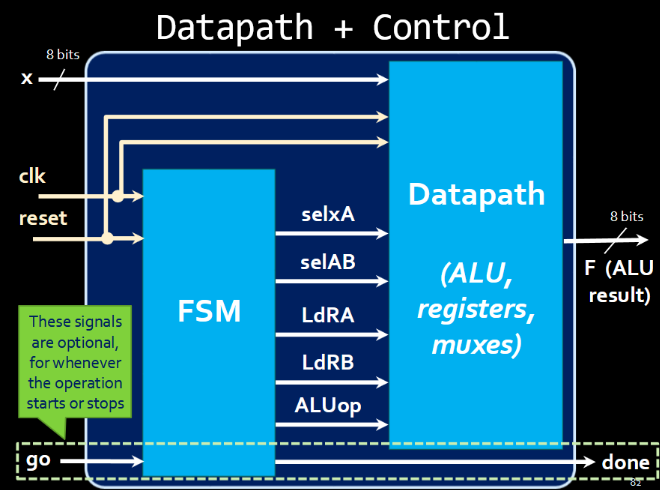
The Datapath is where all data computations take place
- Usually registers, computational stuff, and wires and muxes.
- A big “schematic” that the control unit actually controls.
- The ALU and the Storage Unit
- Registers, computers, things that connect em
- The Control Unit
- The “mind” of the processor that decides what’s going on.
- Basically a big FSM
- Going between states that invoke different control signals.
- Synced to system-wide signals (clock, reset)
- The outputs are just (datapath) control signals
- These are invoked to do things in the data path; I like to think of the data path as a schematic
- That would be SelxA, SelAB, ALUop, LdRA, and LdRB (possibly done as well, to say “the FSM is done!“)
- When done is 1, the output assumes its “meaning”
- Also go is another way to control the processor (“hey, processor, do things now” or “don’t do anything please”)
Datapath + Control
Example: Make a processor that calculates
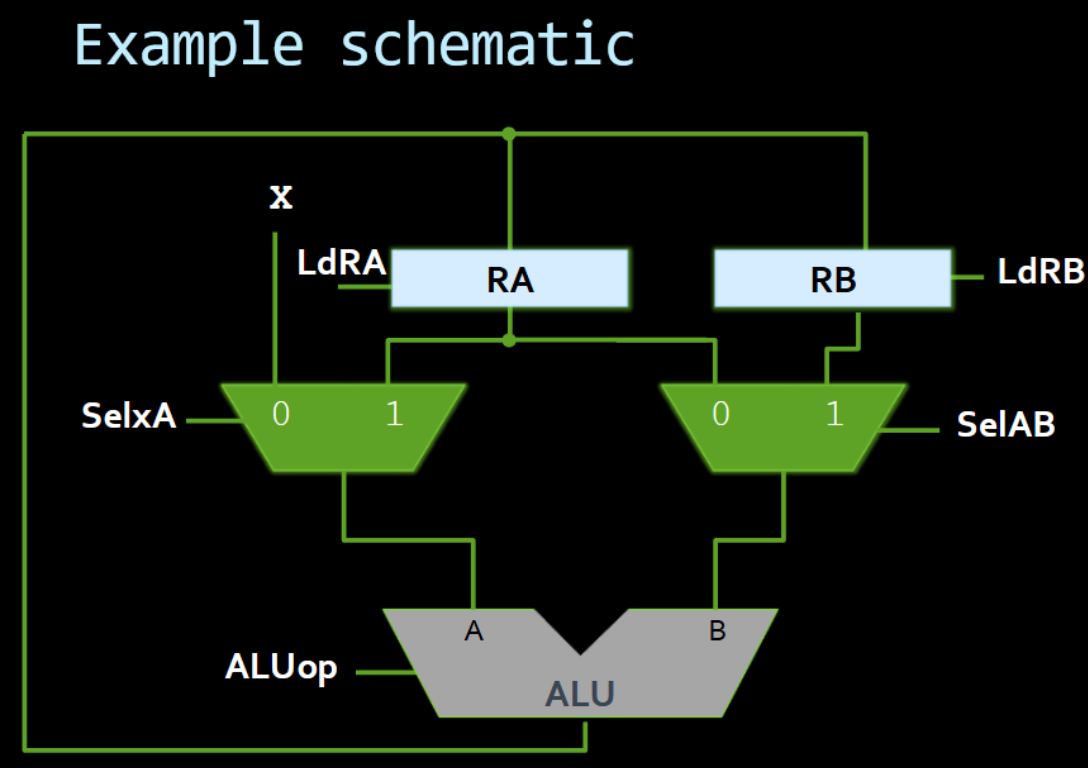
- This is the schematic given. The inputs and whatnot come from the FSM!
- Only 1 input: X
- SelxA, SelAB, ALUop, LdRA, and LdRB are all control signals
LdRA= load register A. Same withLdRB- If on, then RA is stored on the rising edge. Otherwise its not
- The sequential parts are the MUX’s are possibly the ALU (depends on how we’re multiplying)
- We assume we’re using the fat, combinational-circuit-type multiplier
- Implicitly everything is connected by the clock signal.
When creating the algorithm to do this, note that
- Algorithm (would this be the datapath?todo)
- On the first step, X gets stored into RA and RB. In the second step, we multiply X with itself via the two MUX’s
- Remember that the ALU has a “pass-through” operation!
- Now X is in RA and RB and the input. Multiply X by itself using any of these sources to get X^2 and store it into RA
- RA has x^2 now
- RB still has x (we did NOT toggle LdRB)
- We can use the X source and RB and add those together to get 2x and store it into RB.
- But in other scenarios, the source X could be gone!
- In that case, we can do x^2 + x, and then x^2 + x + x (i.e. we’re adding from RB twice into RA)
Here is the final table; running these in order gets the required result!
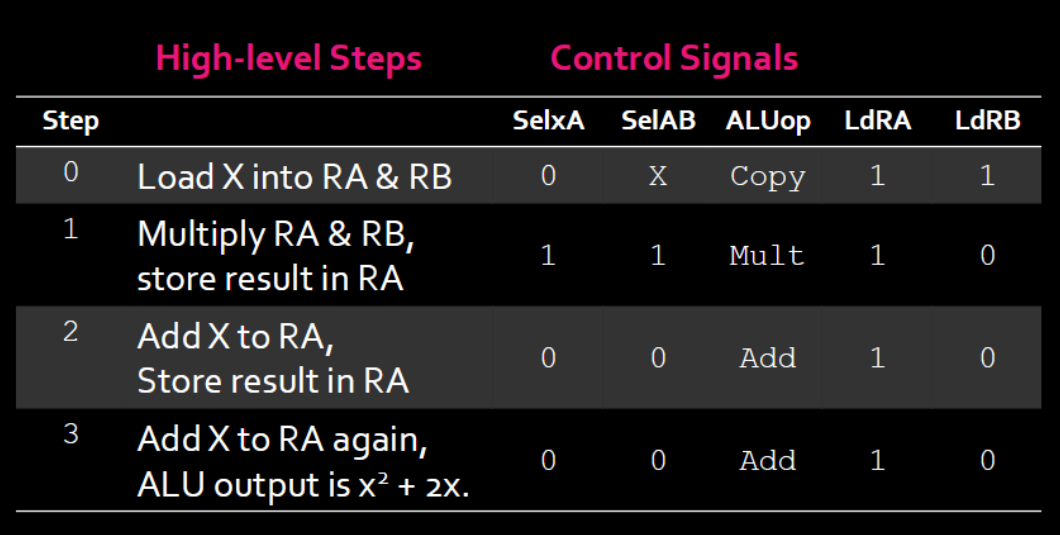
- On the first step, X gets stored into RA and RB. In the second step, we multiply X with itself via the two MUX’s
- For the state table
- SelAB is “X” for “dont care” since we are not using B when “copying” A
- The rest are obvious
The Storage unit thing
- We know of registers